一种快速装卸机械爪的机械臂
- 申请号:CN202221651374.6
- 专利人:承德石油高等专科学校
- 专利类型:实用新型
- 申请日:2022.06.14
- 授权公告日:2022.10.28
- 价格:面议
商标顾问 李老师
0314-2370116

微信扫码咨询细节
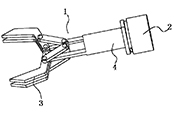
本实用新型公开了一种快速装卸机械爪的机械臂,涉及机械臂技术领域。该实用新型包括机械爪和机械臂,机械爪包括抓夹和外部套筒,外部套筒一端固定有安装板,安装板外圈固定有若干限位块,机械臂一端固定有定位槽,定位槽内部中央位置固定有定位板,定位槽内壁滑动连接有定位条,定位条一侧固定有固定板,固定板内壁开有放置槽,放置槽内圈与安装板外圈相匹配。本实用新型通过安装板的作用,该装置可以灵活的对机械爪和机械臂进行安装和拆卸,且用两螺钉杆即可固定,相较于传统的多螺钉固定,不仅可以高效的对机械爪进行拆装,同时固定板也对外部套筒产生了保护作用,避免机械爪与机械臂的安装部分在多次拆装的过程中受损。
1.一种快速装卸机械爪的机械臂,包括机械爪(1)和机械臂(2),其特征在于:所述机械爪(1)包括抓夹(3)和外部套筒(4);
所述外部套筒(4)一端固定有安装板(5),所述安装板(5)外圈固定有若干限位块(6);
所述机械臂(2)一端固定有定位槽(7),所述定位槽(7)内部中央位置固定有定位板(8);
所述定位槽(7)内壁滑动连接有定位条(9),所述定位条(9)一侧固定有固定板(10),所述固定板(10)内壁开有放置槽(11),所述放置槽(11)内圈与安装板(5)外圈相匹配;
所述固定板(10)一侧固定有限位板(12),所述固定板(10)远离限位板(12)一侧开有限位槽(13),所述固定板(10)一侧开有若干螺纹孔(14),所述螺纹孔(14)内部螺纹连接有螺纹杆(15)。