加工复杂球形曲面壳体的机械臂系统
- 申请号:CN201921224776.6
- 专利人:上海建桥学院有限责任公司
- 专利类型:实用新型
- 申请日:2019.07.31
- 授权公告日:2020.07.17
- 价格:面议
商标顾问 李老师
0314-2370116

微信扫码咨询细节
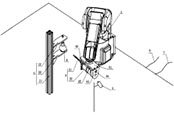
本实用新型涉及一种加工复杂球形曲面壳体的机械臂系统,该机械臂系统包括机械臂、工作支架、加工装置、工件图像获取装置和控制台,其中:工作支架设置于机械臂工作范围内,用于固定工件;加工装置通过夹具体连接在机械臂的末端,该加工装置具有加工刀具,夹具体上设有用于感应加工过程中加工刀具与工件之间力的大小的力传感器;工件图像获取装置用于获取工件的三维图像,并得到工件的坐标信息特征;控制台用于接收工件的坐标信息特征数据和力传感器数据,并控制机械臂,对工件加工。与现有技术相比,本实用新型结构简单,操作稳定且精度高。
1.一种加工复杂球形曲面壳体的机械臂系统,其特征在于,包括:
机械臂(1),
工作支架(2),设置于机械臂(1)工作范围内,用于固定工件(8),
加工装置(3),通过夹具体连接在机械臂(1)的末端,该加工装置(3)具有加工刀具(31),夹具体上设有用于感应加工过程中加工刀具(31)与工件(8)之间力的大小的力传感器(44),
工件图像获取装置,用于获取工件(8)的三维图像,并得到工件(8)的坐标信息特征,
控制台,用于接收工件(8)的坐标信息特征数据和力传感器数据,并控制机械臂(1),对工件(8)加工。